Steinberg SBS-THE-600 handleiding
Handleiding
Je bekijkt pagina 8 van 49
14 15
Rev. 22.02.2022
Rev. 22.02.2022
F1 ALL / P_
Um die Dierenz zwischen den tatsächlichen Koordinaten
mit den entworfenen Koordinaten zwischen den Punkten
1 bis 4 zu vergleichen, kann der Benutzer den Befehl „ALL“
ausführen, um die Koordinaten für die aktuelle Aufgabe zu
messen und zu speichern.
Exportieren Sie dazu die aktuellen Dateien auf einen USB-
Stick und önen Sie die CSV-Datei mit Microsoft-Excel.
Vergleichen Sie die Dierenz zwischen der tatsächlichen
und der entworfenen Koordinate, um die Absteckergebnisse
zu überprüfen. Zielen Sie in Schritt 1 auf die Prismenmitte.
Drücken Sie F1 ALL, um die Daten zu speichern (Abb. A),
und drücken Sie dann F4 YES, um den Namen zu ändern.
Messen Sie die Koordinaten des 2/3/4 Punkts wie in den
Abbildungen c-h gezeigt.
1. Überprüfen Sie die Liste der Punkte in der aktuellen
Reihenfolge: Drücken Sie F2 S.O in P3. Drücken Sie F2
1.OCC. PT INPUT und LIST, um die Liste anzuzeigen
(Abb. C).
2. Exportieren Sie den aktuellen Auftrag auf einen
USB-Stick. Daten- und CSV-Dateien können in der
SOUTH CASS-Software verwendet werden. Die
DXF-Datei ist ein Grakaustauschformat, das von
AutoCAD und CASS erkannt werden kann. dxf ist ein
Grakaustauschformat, das von AutoCAD erkannt
und als DWG-Format gespeichert werden kann. Die
txt-Dateien sind Rohdaten im Format 300 und 600.
* Die Datei „.dat“ kann von Windows TXT und die
Datei „.csv“ von Microsoft EXIT Coord File Export STN
K329 Excel geönet werden
6.2. SEITENMESSUNG
Drücken Sie F2 S.O in P3. Wenn die Sicht zwischen dem
belegten Punkt und dem Absteckpunkt verdeckt ist, kann
der Benutzer den Befehl „Side Shot“ oder „Resection“
ausführen, um den belegten Punkt hinzuzufügen.
Rufen Sie das Side Shot-Menü auf. Geben Sie P1 als Namen
des Punktes ein und zielen Sie auf die Mitte des Punktes.
Drücken Sie F4 MEAS, um die Koordinaten des P1-Punkts
zu messen. Drücken Sie dann zum Speichern F4 YES.
Stellen Sie die Tachymeter auf P1 und stellen Sie die
Position ein. Drücken Sie 1.OCC. PT INPUT Drücken Sie
im Absteckmenü F2 LIST, um die Punkteliste aufzurufen.
Bewegen Sie den Cursor auf P1 und drücken Sie ENT, um
Details anzuzeigen. Drücken Sie F4 YES und befolgen Sie die
nächsten Schritte wie in den vorherigen Beschreibungen.
6.3. RESEKTION
Resektion auch als freie Station bekannt. Wenn Sie den
Tachymeter an einem unbekannten Punkt einrichten,
werden die Koordinaten des belegten Punkts berechnet,
indem die Entfernung für etwa 2-7 bekannte Punkte oder
der Winkel für 3-7 bekannte Punkte gemessen wird.
Winkelresektion
Drücken Sie auf der zweiten Seite der Absteckfunktion
1.RESECTION, um zur nächsten Seite zu gelangen. Die
Koordinate kann nach Messung von mindestens 3 Punkten
berechnet werden.
1. Messen Sie den ersten bekannten Punkt: Geben
Sie P1 als neuen Stationsnamen und Gerätehöhe
ein (Abb. B). Drücken Sie F4 ENT, um zur Messseite
zu gelangen. Geben Sie den bekannten Punkt Q1
ein und drücken Sie F4. Das System ruft die Q1-
Koordinate aus der Liste auf und drückt F4 OK. Zielen
Sie auf das Prismenzentrum am Punkt Q1 (Abb. F).
Drücken Sie F3 ANG, um die Messung zu beenden.
Das System misst dann weiter für den zweiten Punkt.
2. Messen Sie einen zweiten bekannten Punkt: wie in
den Bildern g-j.
3. Messen Sie einen dritten bekannten Punkt, wie in den
k-m-Abbildungen gezeigt.
Drücken Sie nach dem Messen des Q1/Q2/Q3-Punkts F1
NEXT, um zu Punkt 4 zu gelangen, oder drücken Sie F4
CALC, um die Koordinate zu berechnen (Abb. O). Drücken
Sie F4 NEZ, um das Ergebnis anzuzeigen. Dann F4 YES, um
die Daten im aktuellen Task zu speichern.
Distanzresektion
Bei der Distanzresektionsmethode sollten mindestens
2 bekannte Punkte in die Berechnung der Koordinate
einbezogen werden. Die Schritte ähneln der
Winkelresektionsmethode. Das einzige, worauf Sie achten
müssen, ist das Drücken der Taste F4 DIST, nachdem Sie
auf den Punkt gerichtet haben. Die Methode ähnelt der
Winkelresektion.
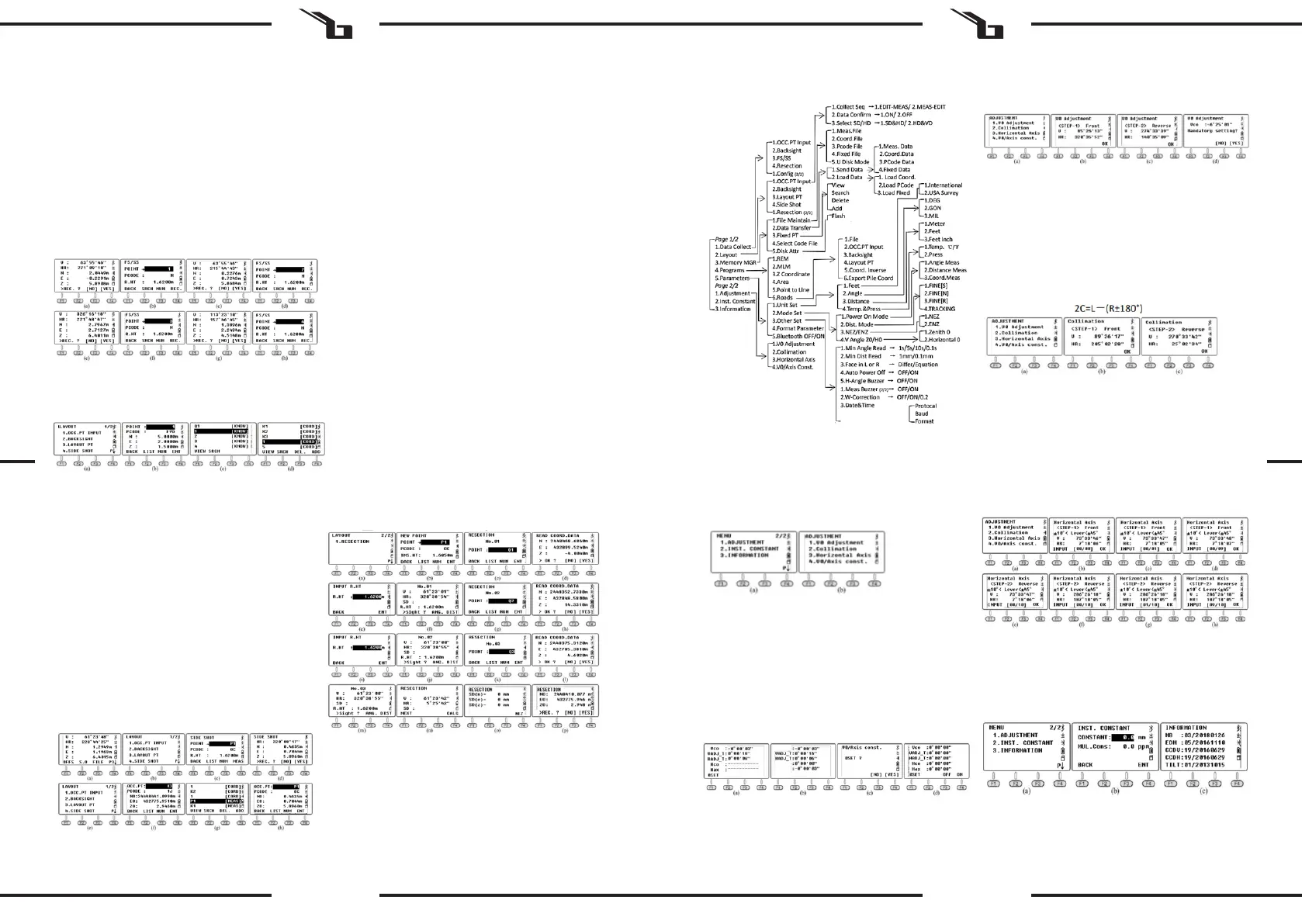
7. EINSTELLUNG UND INFORMATIONEN
Der Aufbau des Menüsystems ist wie folgt:
7.1. EINSTELLUNG
Drücken Sie auf der 2. Menüseite 1. ADJUSTMENT. Es
enthält vier Befehle: 1. V0-Steuerung, 2. Kollimation, 3.
Horizontale Achse und 4. V0/Feste Achse. Der letzte Befehl
V0/Feste Achse zeigt die Ergebnisse der vorherigen drei
Befehle an. Bitte führen Sie den letzten Befehl aus, bevor Sie
die Befehle 1-3 ausführen, um die vorhandenen Ergebnisse
zu löschen. Bitte önen Sie den Sensor und stellen Sie den
Tachymeter gut ein, bevor Sie die Befehle ausführen.
Der horizontale Winkel sollte HR (horizontal rechts) sein
und der V-Winkel sollte auf Zenit 0 eingestellt sein.
7.1.1. V0/FESTE ACHSE
Drücken Sie im Menü „Einstellung“ die Taste 4. V0/
Axis const.. VADJ_T und HADJ_T beziehen sich auf einen
Sensorfehler, wenn ein elektrischer Sensor installiert
ist. Drücken Sie F3 OFF, um die horizontale Achse zu
verlassen und Fehler 2C einzustellen. Drücken Sie F4,
um die Einstellung der horizontalen Achse zu aktivieren.
Drücken Sie F1 OSET, um das vorherige Ergebnis auf Null
zurückzusetzen.
7.1.2. V0 EINSTELLUNG (WINKEL i)
Berechnen Sie den Fehler des vertikalen Ziels, um den
vertikalen Messwert zu korrigieren, indem Sie ein klares Ziel
auf beiden Seiten messen. Zielen Sie auf das Ziel im HL-
Programm, drücken Sie F4 1.V0 Adjustment (Abb. B) und F4
OK. Drehen Sie das Gerät so, dass es auf denselben Punkt im
Wenn der vertikale Winkel 0 ist, ist i = (L + R-360 °)/233
Wenn der vertikale Winkel horizontal 0 ist, ist i = (L + R-180
°)/2 oder (L + R-540 °) / 2
7.1.3. KOLIMATION (2C)
Berechnen Sie den 2C-Fehler, um den horizontalen
Messwert zu korrigieren, indem Sie ein klares Ziel von
beiden Seiten messen. Zielen Sie auf das Ziel in HL, drücken
Sie 2.Collimation (Abb. B) und F4 OK. Drehen Sie das Gerät
so, dass es auf denselben Punkt in HR zielt (Abb. C), und
drücken Sie F4 OK, um die Einstellung abzuschließen.
7.1.4. HORIZONTALE ACHSE
Berechnen Sie den Fehler der horizontalen Achse, um den
horizontalen Messwert anzupassen, indem Sie das Ziel mit
einem vertikalen Winkel messen: ± 10 ° ~ ± 45 ° auf beiden
Seiten. Zielen Sie auf HL ein Ziel mit einem vertikalen
Winkel von ± 10 ° ~ ± 45 ° und drücken Sie dann 3, um die
Seite der horizontalen Achse zu betreten (Abb. B). Drücken
Sie ungefähr 10 Mal F4 OK.
Drehen Sie das Gerät, um auf den gleichen Punkt auf der HR
zu zielen (Abb. C), und drücken Sie dann ca. 10 Mal F4 OK,
um die Einstellung abzuschließen.
*Bitte stellen Sie den i-, 2C-Winkel und die horizontale Achse
nach längerem Transport oder anderen Vibrationen ein.
7.2. INFORMATIONEN
7.2.1. Drücken Sie auf der 2. Menüseite die Taste 2.INST.
CONSTANT (Abb. B). Der Standardwert ist 0. Ändern Sie
diesen Wert nicht ohne Genehmigung.
7.2.2. INFORMATIONEN
Drücken Sie 3. Information auf der 2. Menüseite (Abb. B).
1. MB: 03/20180126 - Motherboard 03,
Aktualisierungsdatum ist der 26. Januar 2018.
2. EDM: 05/20161110 - EDM 05, Aktualisierungsdatum
ist der 10. November 2016.
HR-Programm zielt (Abb. C), und drücken Sie F4 OK, um die
Einstellung abzuschließen. Der Fehlerwert des vertikalen Ziels
wird angezeigt (Abb. D). Drücken Sie zur Bestätigung F4 YE.
DEDE
Bekijk gratis de handleiding van Steinberg SBS-THE-600, stel vragen en lees de antwoorden op veelvoorkomende problemen, of gebruik onze assistent om sneller informatie in de handleiding te vinden of uitleg te krijgen over specifieke functies.
Productinformatie
| Merk | Steinberg |
| Model | SBS-THE-600 |
| Categorie | Niet gecategoriseerd |
| Taal | Nederlands |
| Grootte | 19988 MB |







