Eaton Green Motion XCI000411 handleiding
Handleiding
Je bekijkt pagina 52 van 107
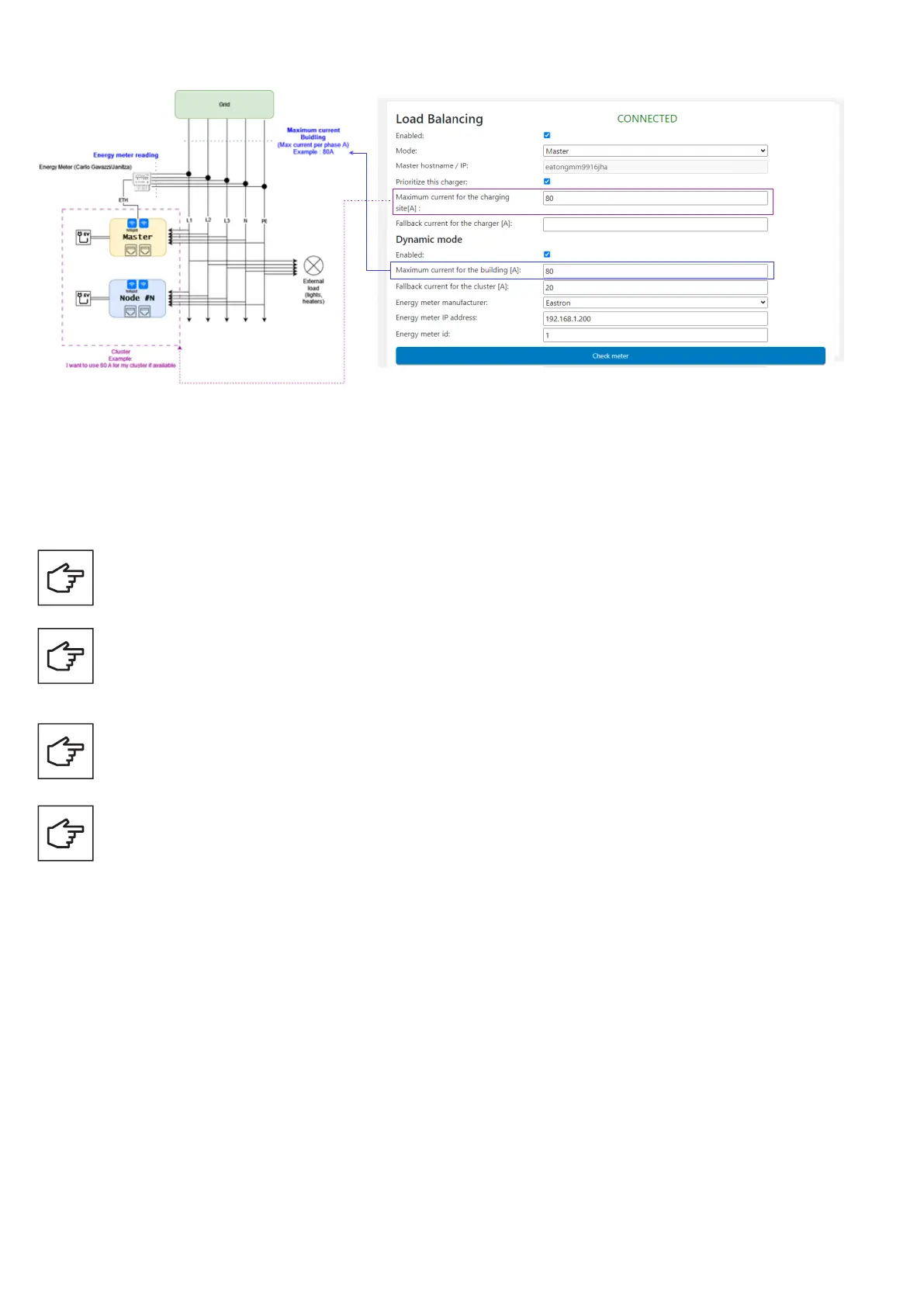
Figure 27. Dynamic load balancing example
7.3 Phase balancing
For grid stability, the difference in current between phases should be limited as large differences decrease the power quality.
In EV charging, the phase imbalance is created when there is simultaneous three-phase charging, two-phase charging, and
one-phase charging. Most cars that charge in one phase use L1, hence increasing the difference in the current of L1 and the
currents of the other phases.
To ensure grid stability, it is good practice to alternate the phase connections during installation to have a robust and
optimized system.
On top of that, the Green Motion Building EV charger is equipped with a phase balancing algorithm that allows for a continuous
monitoring and balancing of the phase current, always ensuring grid stability.
7.2.4 Networking EV chargers
Green Motion Building EV chargers can be connected to form a network. Refer to section 8.4 for the available networking
options. Before creating the network, complete the installation and wiring of all EV chargers participating in the network. EV
chargers should then be configured according to location and network parameters. The charger that acts as the network
Master should be configured first, followed by the EV chargers configured as nodes. An energy meter should be connected to
the Master EV charger if dynamic load balancing is required.
In case of communication loss between the Master EV charger and the energy meter, the load balancing algorithm
will use the value of “Fallback current for the cluster [A]” as the available charging current budget for distribution.
In case of temporary communication loss between the Master and a node, the node EV charger will retry to establish
communication with the Master and continue to charge the vehicle using the last value received for 30 seconds. If
the node is not able to recover the communication with the Master, it will adapt its charge to the ‘Fallback current
for the charger’ value while it is still not connected to the Master. The charging session will be suspended if the
‘Fallbackcurrent for the charger’ value is lower than the minimum charging value defined in the charger.
When a network of Green Motion Building EV chargers is in online mode, in case of temporary communication loss
between the Master and the backend each node will try to reconnect to backend. If the Master is unable to recover
the communication with the backend for 30 seconds, all the nodes will adapt their chargers for the ‘Fallback current
for the charger’ value.
When a network of Green Motion Building EV chargers is created, the Master and other nodes use self- signed
certificates generated by the Master to form a trusted network. In case the Master EV charger is not operational
and needs to be replaced, the network must be reconfigured. Reconfiguration of the network requires all Nodes
in the network to undergo a reconfiguration with the hostname of the new Master. In case of offline mode, a new
commissioning pairing is required.
52
GREEN MOTION BUILDING INSTALLATION MANUAL MN191028EN April 2024 www.eaton.com
Bekijk gratis de handleiding van Eaton Green Motion XCI000411, stel vragen en lees de antwoorden op veelvoorkomende problemen, of gebruik onze assistent om sneller informatie in de handleiding te vinden of uitleg te krijgen over specifieke functies.
Productinformatie
| Merk | Eaton |
| Model | Green Motion XCI000411 |
| Categorie | Niet gecategoriseerd |
| Taal | Nederlands |
| Grootte | 16416 MB |
