Curtis 1220E handleiding
Handleiding
Je bekijkt pagina 35 van 72
3 — PROGRAMMABLE PARAMETERS
pg. 31
Return to TOC Curtis Model 1220E – August 2022
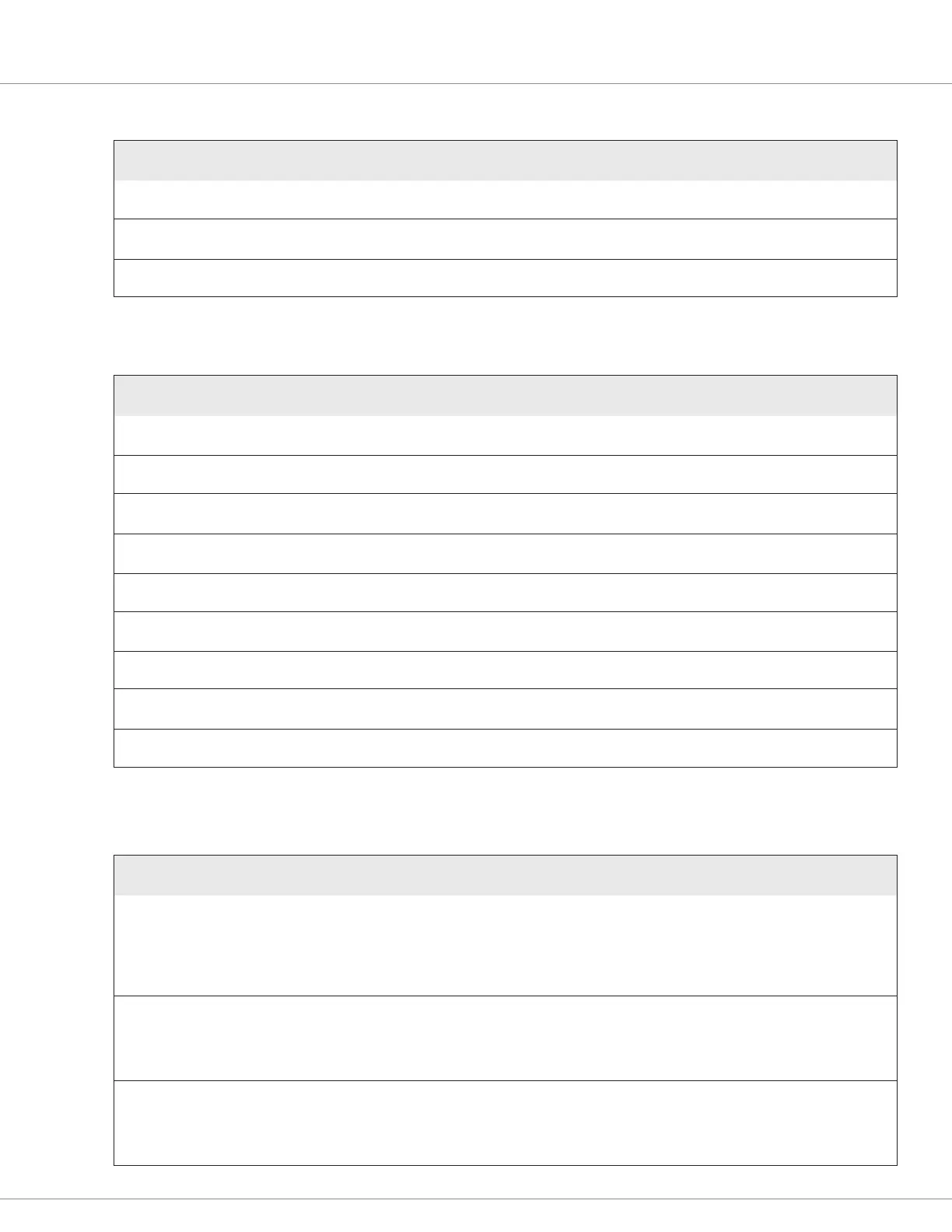
RPDO1 MAPPING
NAME
ALLOWABLE
RANGE RAW DATA DESCRIPTION
Length
(0x160000, 8bits)
0 – 8
0 – 8
Denes the maximum supported sub-index.
Map 1
(0x160001, 32bits)
0 – 0xFFFFFFFF
0 – 0xFFFFFFFF
Default mapping to Traction Motor Speed.
Map 2
(0x160002, 32bits)
0 – 0xFFFFFFFF
0 – 0xFFFFFFFF
Default mapping to Traction is Ready.
Map 3
(0x160003, 32bits)
0 – 0xFFFFFFFF
0 – 0xFFFFFFFF
Default mapping to CAN Interlock.
Map 4
(0x160004, 32bits)
0 – 0xFFFFFFFF
0 – 0xFFFFFFFF
Default mapping to CAN Command 1.
Map 5
(0x160005, 32bits)
0 – 0xFFFFFFFF
0 – 0xFFFFFFFF
Default mapping to CAN Command 2.
TPDO1 MAPPING
NAME
ALLOWABLE
RANGE RAW DATA DESCRIPTION
Length
(0x1A0000, 8bits)
0 – 8
0 – 8
Denes the maximum supported sub-index.
Map 1
(0x1A0001, 32bits)
0 – 0xFFFFFFFF
0 – 0xFFFFFFFF
Default mapping to the steering wheel position.
Map 2
(0x1A0002, 32bits)
0 – 0xFFFFFFFF
0 – 0xFFFFFFFF
Default mapping to the present ashing fault code.
Map 3
(0x1A0003, 32bits)
0 – 0xFFFFFFFF
0 – 0xFFFFFFFF
Default mapping to the traction cutback data.
Map 4
(0x1A0004, 32bits)
0 – 0xFFFFFFFF
0 – 0xFFFFFFFF
Default mapping to the traction fault action.
Map 5
(0x1A0005, 32bits)
0 – 0xFFFFFFFF
0 – 0xFFFFFFFF
Default mapping to enable traction.
Map 6
(0x1A0006, 32bits)
0 – 0xFFFFFFFF
0 – 0xFFFFFFFF
Default mapping to steer command.
Map 7
(0x1A0007, 32bits)
0 – 0xFFFFFFFF
0 – 0xFFFFFFFF
No mapping.
Map 8
(0x1A0008, 32bits)
0 – 0xFFFFFFFF
0 – 0xFFFFFFFF
No mapping.
NAME
ALLOWABLE
RANGE RAW DATA DESCRIPTION
Map 6
(0x160006, 32bits)
0 – 0xFFFFFFFF
0 – 0xFFFFFFFF
No mapping.
Map 7
(0x160007, 32bits)
0 – 0xFFFFFFFF
0 – 0xFFFFFFFF
No mapping.
Map 8
(0x160008, 32bits)
0 – 0xFFFFFFFF
0 – 0xFFFFFFFF
No mapping.
RPDO1 MAPPING cont'd
MOTOR CONTROL TUNING
NAME
ALLOWABLE
RANGE RAW DATA DESCRIPTION
Position Kp
(0x378000, 16bits)
0 – 100.0%
0 – 32767
Determines how aggressively the steer controller attempts to match the steer
position to the commanded steer position. Larger values provide tighter control.
If the gain is set too high, you may experience oscillations as the controller tries
to control position. If it is set too low, the motor may behave sluggishly and be
difcult to control. Position Kp can be ne-tuned using the Steering Sensitivity
parameters.
Velocity Kp
(0x382B00, 16bits)
0 – 100.0%
0 – 32767
Determines how aggressively the steer controller attempts to match the steer
velocity to the determined velocity to reach the desired position. Larger values
provide tighter control. If the gain is set too high, you may experience oscillations
as the controller tries to control velocity. If it is set too low, the motor may behave
sluggishly and be difcult to control.
Velocity Ki
(0x382A00, 16bits)
0 – 100.0%
0 – 32767
The integral term (Ki) forces zero steady state error in the determined velocity,
so the motor will run at exactly the determined velocity. Larger values provide
tighter control. If the gain is set too high, you may experience oscillations as the
controller tries to control velocity. If it is set too low, the motor may take a long
time to approach the exact commanded velocity
Bekijk gratis de handleiding van Curtis 1220E, stel vragen en lees de antwoorden op veelvoorkomende problemen, of gebruik onze assistent om sneller informatie in de handleiding te vinden of uitleg te krijgen over specifieke functies.
Productinformatie
| Merk | Curtis |
| Model | 1220E |
| Categorie | Niet gecategoriseerd |
| Taal | Nederlands |
| Grootte | 9449 MB |







