Furuno NAVpilot-1000 handleiding
Handleiding
Je bekijkt pagina 19 van 89
1. OPERATION
1-7
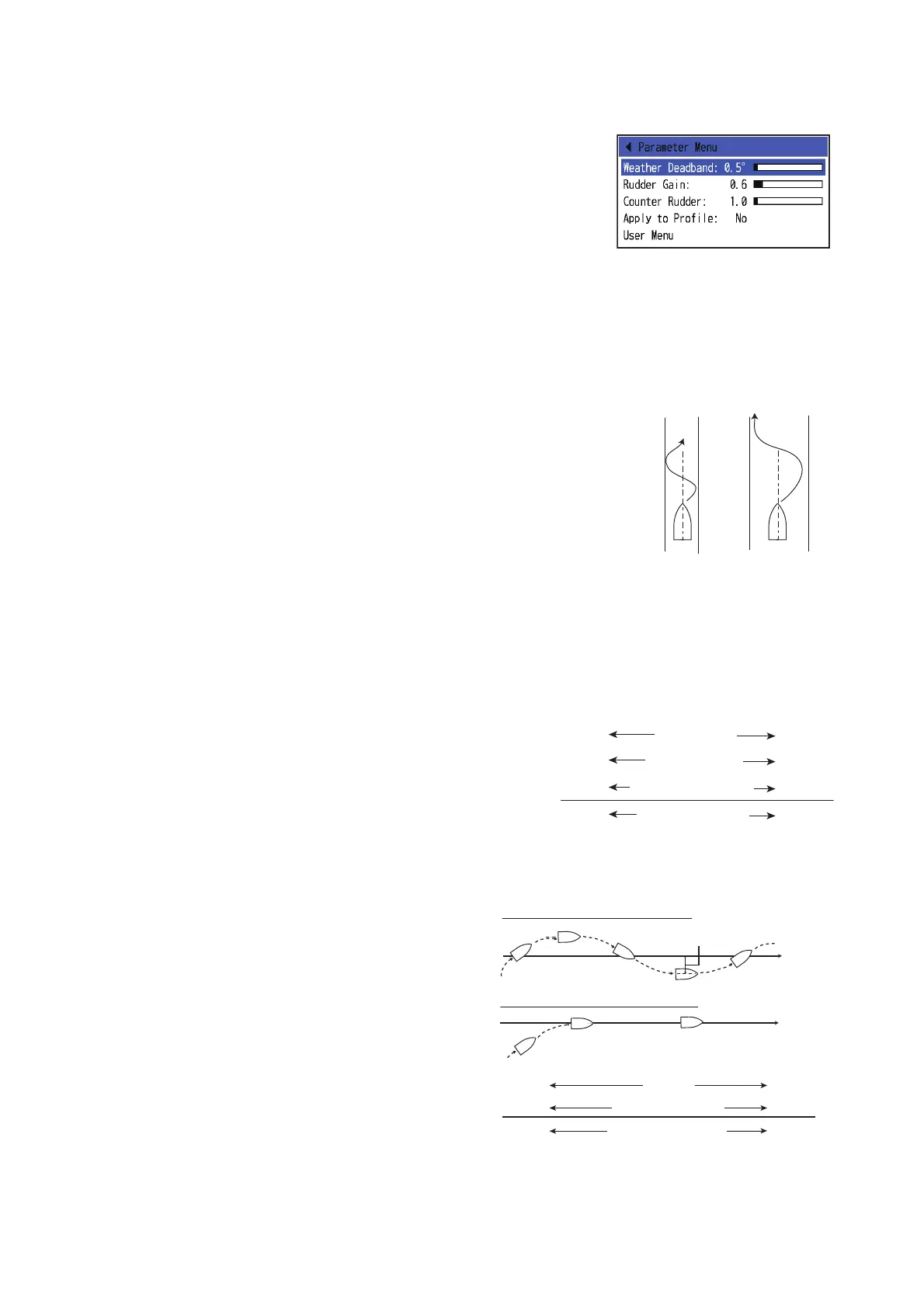
1.6 Parameter Menu
You can adjust the NAVpilot steering parameters
([Weather Deadband], [Rudder Gain], [Counter
Rudder]) from the [Parameter Menu] window. To open
the [Parameter Menu] window, press the MENU/ESC
key.
After adjusting the settings, set [Apply to Profile] to
[Yes] to apply the settings to the current work profile.
Note 1: The parameters on the [Parameter Menu] window cannot be adjusted when
[Self Learning] is set to [ON].
Note 2: Change parameters carefully because parameter changing is reflected to
ship's motion immediately.
• [Weather Deadband]: When the sea is rough, the boat's
heading fluctuates to port and starboard. If the rudder is
driven very often to maintain the set course, the helm
mechanism may wear out. To prevent this, the weather
deadband adjustment makes the NAVpilot insensitive
to minute course deviations. You may choose a degree
between 1° to 10°. Until the course deviation exceeds
the selected setting, steering to correct the heading will
be minimized.
The illustration shown above shows boat's track lines
with weather deadband setting 3° and 7°. When 7° is set, for example, the steering
to correct the heading is minimized until the course deviation exceeds 7°. Increasing
the setting reduces activation of the steering gear, however the boat tends to zig-
zag. When the sea is calm, set a smaller value.
• [Rudder Gain]: When the boat's heading de-
viates from the set course, the NAVpilot ad-
justs the rudder to correct it. The rudder
angle (number of degrees) which is steered
against every degree of course deviation is
known as the rudder gain.
Set the rudder gain so that the boat does not make frequent yaw. The figure shown
above provides general guidelines for setting the rudder gain.
• [Counter Rudder]: If the boat is
heavily loaded, the heading could
change excessively because of iner-
tia. This phenomenon causes the
vessel to "overshoot" the intended
course. If this happens, the NAVpilot
steers the rudder to the opposite
side and the heading turns in the op-
posite direction excessively again.
In an extreme case the heading os-
cillates several times until it finally
[Weather
Deadband]
= 3°
[Weather
Deadband] =
7°
Speed
Sea State
Load Condition
[Rudder Gain]
Fast
Calm
Light
Low
Slow
Rough
Heavy
High
Counter rudder: small setting
Counter rudder: proper setting
Large course error
Intended
course
The counter rudder feature functions to smoothly
return ship's heading toward intended course.
Slow
Heavy
High
Fast
Light
Low
Speed
Load Condition
[Counter Rudder]
Bekijk gratis de handleiding van Furuno NAVpilot-1000, stel vragen en lees de antwoorden op veelvoorkomende problemen, of gebruik onze assistent om sneller informatie in de handleiding te vinden of uitleg te krijgen over specifieke functies.
Productinformatie
| Merk | Furuno |
| Model | NAVpilot-1000 |
| Categorie | Niet gecategoriseerd |
| Taal | Nederlands |
| Grootte | 9190 MB |







