Curtis 1220E handleiding
Handleiding
Je bekijkt pagina 33 van 72
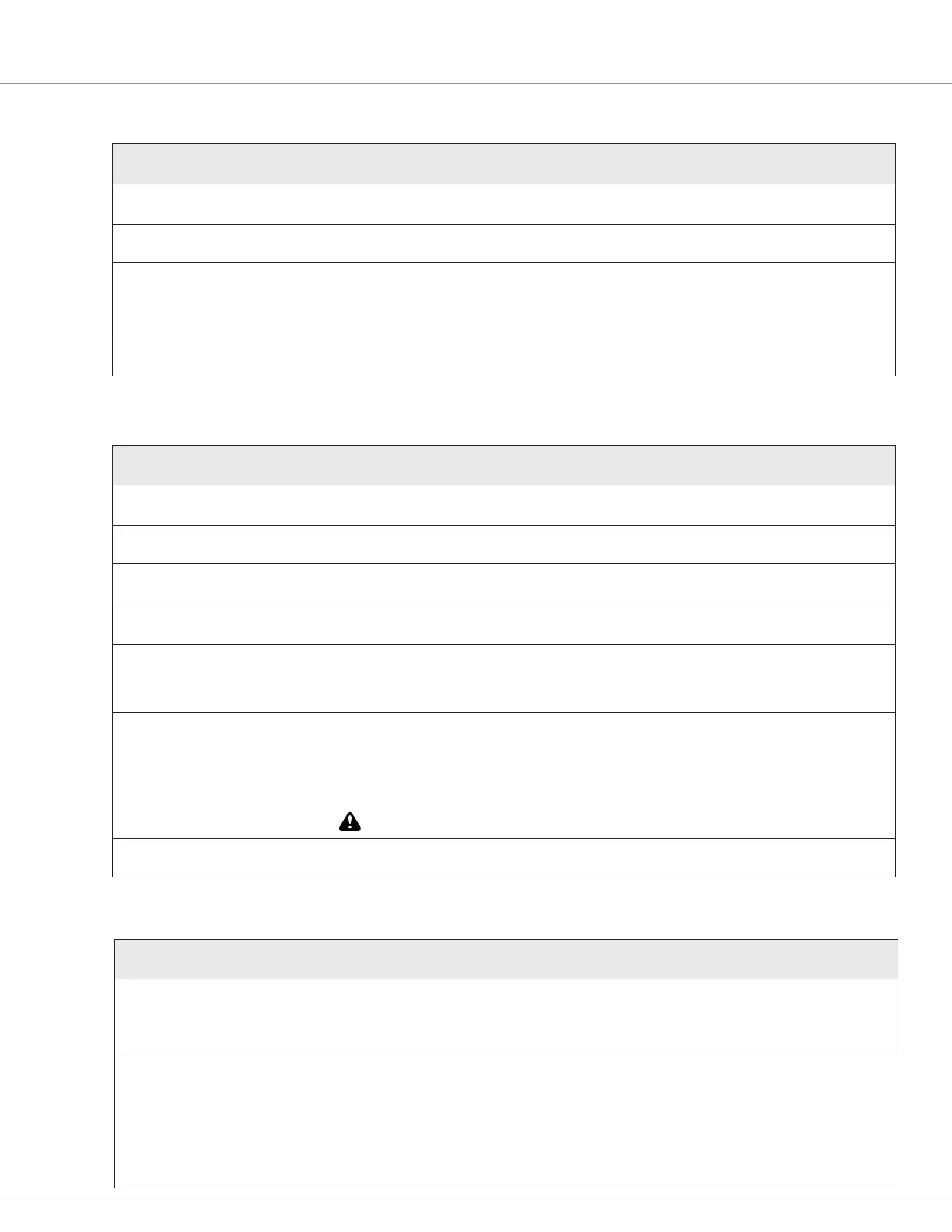
3 — PROGRAMMABLE PARAMETERS
pg. 29
Return to TOC Curtis Model 1220E – August 2022
CURRENT
NAME
ALLOWABLE
RANGE RAW DATA DESCRIPTION
Drive Current Limit
(0x343B00, 16bits)
10 – 60 A
40 – 240
Denes the maximum current the controller will supply to the steer motor during
drive state.
Regen Current Limit
(0x344100, 16bits)
10 – 60 A
40 – 240
Denes the maximum current the controller will supply to the steer motor during
regen state.
Boost Enable
(0x343300, 8bits)
OFF / ON
0 / 1
Enable/Disable the boost feature.
When enabled the current limit will be increased 10A above the current settings
(Drive Current Limit and Regen Current Limit), the max boost current is 70A.
Note: The controller heatsink temperature is less than 75°C.
Boost Time
(0x343500, 16bits)
0 – 10.0s
0 – 625
Set the maximum time that the boost current is allowed.
MOTOR
NAME
ALLOWABLE
RANGE RAW DATA DESCRIPTION
Max Speed
(0x352300, 16bits)
0 – 8000rpm
0 – 8000
Denes the maximum allowed steer motor RPM.
Gear Ratio
(0x368600, 16bits)
0 – 500.0
0 – 8000
Denes the total gear ratio of gear box, including its speed reducing mechanism.
Current Rating
(0x368300, 16bits)
0 – 50A
0 – 200
This parameter should be set to the motor current rating provided by the motor
manufacturer.
Max Current Time
(0x368400, 16bits)
0 – 120s
0 – 120
Denes the maximum time the motor is allowed to run at the drive current limit.
Cutback Gain
(0x368500, 16bits)
0 – 100%
0 – 255
When the motor overheats, the drive current is cut back until it reaches the
programmed Current Rating. The Cutback Gain determines how quickly this
cutback will be initiated once the programmed Max Current Time has expired. A
higher setting provides faster cutback.
Motor Resistance
(0x369100, 16bits)
0 – 1500 mOhm
0 – 1500
Species the steered motor resistance that the controller uses for motor speed
estimation.
The steered motor resistance data should be provided by the motor manufacturer
or by measurement results.
Specifying 0 disables the steered motor speed estimation feature.
Specifying 0 may cause a higher probability of dangerous failure for single
position encoder applications, and must by evaluated by the OEM.
Disable Motor Polarity Check
(0x369200, 8bits)
OFF / ON
0 – 1
Enable or disable Motor Polarity Fault detection.
CAUTION
CANopen
NAME
ALLOWABLE
RANGE RAW DATA DESCRIPTION
CAN Required
(0x32BA00, 8bits)
OFF / ON
0 / 1
This parameter enables the CAN Not Operational fault detection.
When programmed On, a fault check is made to verify that the steering controller
is set (via the CAN bus) to CAN NMT State = Operational within 80ms of the
interlock being applied.
Baud Rate
(0x200101, 16bits
−1 – 4
−1 – 4
Sets the CAN baud rate:
–1 = 100 Kbps
0 = 125 Kbps
1 = 250 Kbps
2 = 500 Kbps
3 = 800 Kbps
4 = 1 Mbps
Bekijk gratis de handleiding van Curtis 1220E, stel vragen en lees de antwoorden op veelvoorkomende problemen, of gebruik onze assistent om sneller informatie in de handleiding te vinden of uitleg te krijgen over specifieke functies.
Productinformatie
| Merk | Curtis |
| Model | 1220E |
| Categorie | Niet gecategoriseerd |
| Taal | Nederlands |
| Grootte | 9449 MB |







