Cleco DGD 946823D7 handleiding
Handleiding
Je bekijkt pagina 35 van 54
35
P1713E-EN
2013-12
EN
6.10 Redundant Design of a Sensor System (according to VDI 2862)
Calibration notes
If the built-in transducer is operated via offset or angle head attachments, the dynamic efficency factor must
be taken into account accordingly.
• Torque calibration
Variations in efficiency arising from manufacturing conditions make it necessary to take the calibration fac-
tors into account. They can be ascertained only with additional measuring systems, and they have to be
considered as dynamic calibration factors (mk).
Example:
Spindle with transducer 1K2M
and offset attachment 1VK2M
with dynamic calibration factor mk = 1.035
1)
Rated torque = 60 Nm bei 5 VDC
Corrected calibration value
Rated torque x mk
-> 60 Nm x 1.035 = 62.11 Nm
• Angle measurement calibration
The output ratio causes also the angle measurement to change; it is corrected with the angle calibration fac-
tor (WZ).
The angle calibration factor (WR) corresponds to the output ratio (Torques / Speeds / Calibration Data on
page 18).
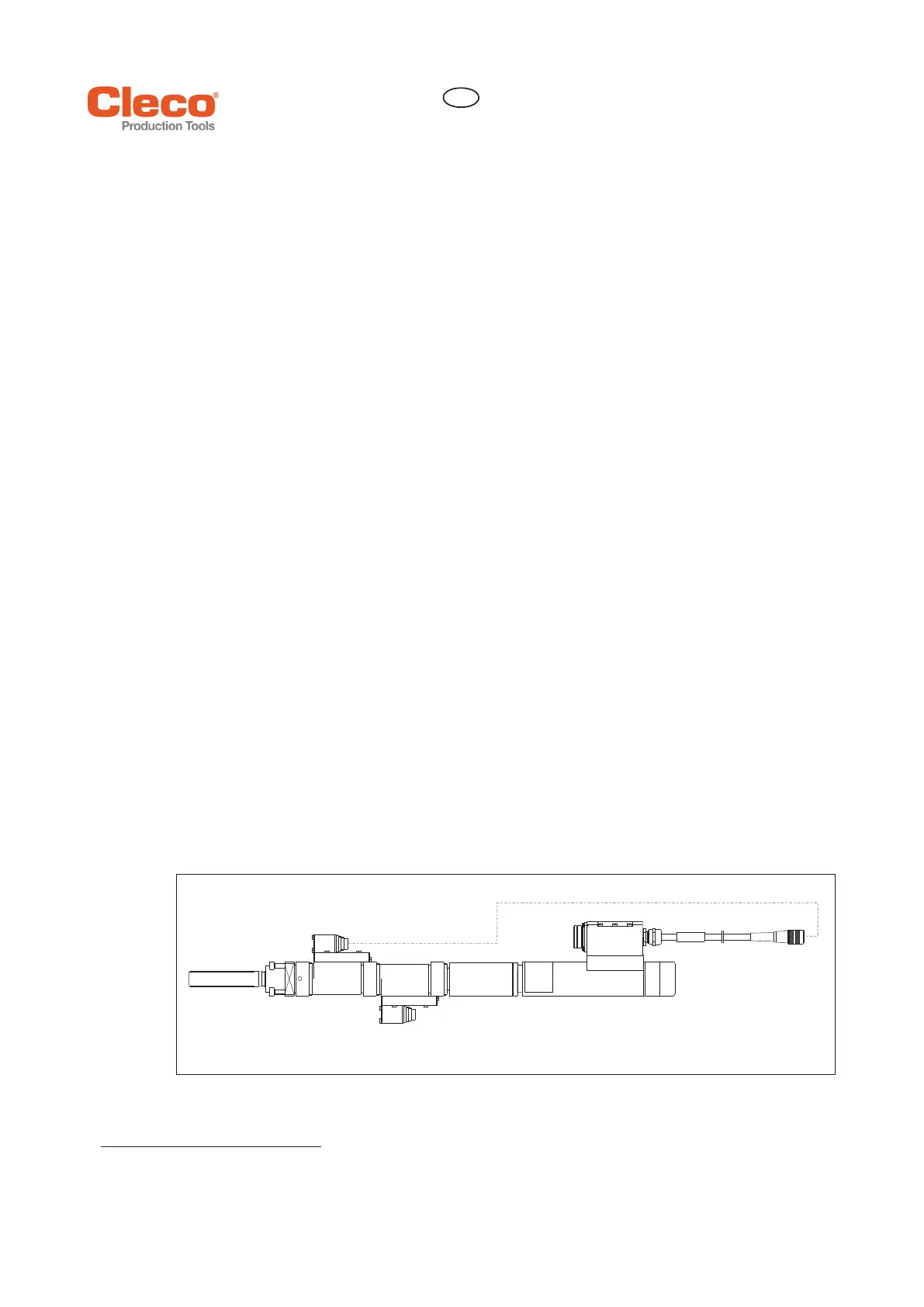
Example for a standard spindle combination
• Straight version
1BB-1B050A-2/1K2M-1ZA
ID no.946780C1
Speed: 272 ¹/min
Max. torque53 Nm
Calibration Md1: 60Nm 5V DC
Calibration Md2: 60Nm 5V DC
Angle calibrationW1: 1.000 ¹/degree
Angle calibrationW2: 1.000 ¹/degree
1. is ascertained with attachment transducer and measuring case MPK
(see System Overview Torque-Controlled on page 10 and Current-Controlled on page 15)
a00330_1.eps
Bekijk gratis de handleiding van Cleco DGD 946823D7, stel vragen en lees de antwoorden op veelvoorkomende problemen, of gebruik onze assistent om sneller informatie in de handleiding te vinden of uitleg te krijgen over specifieke functies.
Productinformatie
| Merk | Cleco |
| Model | DGD 946823D7 |
| Categorie | Niet gecategoriseerd |
| Taal | Nederlands |
| Grootte | 5397 MB |







