IFM RM903S handleiding
Handleiding
Je bekijkt pagina 9 van 26
Encoder (SR) with CANopen interface RM900S RM901S RM902S RM903S
9
5.1 Encoder (SR) safe state
As a CANopen Safety participant, the encoder (SR) switches to the safe state if an error is detected.
This state is reported with a high-priority CAN telegram, the global fail-safe command (GFC) (further
explanations → Chapter “Operation” in the programming manual).
A distinction is made between two safe states:
“Passive safe state”
The passive safe state is always supported regardless of the operating mode set.
In the passive safe state, the encoder (SR) no longer participates in CANopen safety communication.
The encoder (SR) stops the output of cyclical SRDO data so that the downstream CANopen safety
master can detect an error after the safeguard cycle time (SCT) has elapsed.
This is the case, for example, if the communication link is disconnected due to a cable break.
“Active safe state”
The active safe state is only supported in ifm mode.
WARNING
The safety function is displayed via the safe-state bit and must be evaluated.
w If the safe-state bit has been reset, the subsequent output data of the encoder (SR) is
not safe in the sense of a safety standard.
w Further information on evaluation → Programming manual
In the active safe state, the encoder (SR) continues to maintain cyclical communication via SRDO.
The safe state is displayed in the user data of the SRDO via the ifm safety status / safe-state bit.
If additional user data is available for just one measuring channel (e.g. position or speed), this data will
continue to be output.
This is the case, for example, if an internal fault is detected.
This allows the user to move the equipment (e.g. in manual mode) to a park position and bring it to a
safe state.
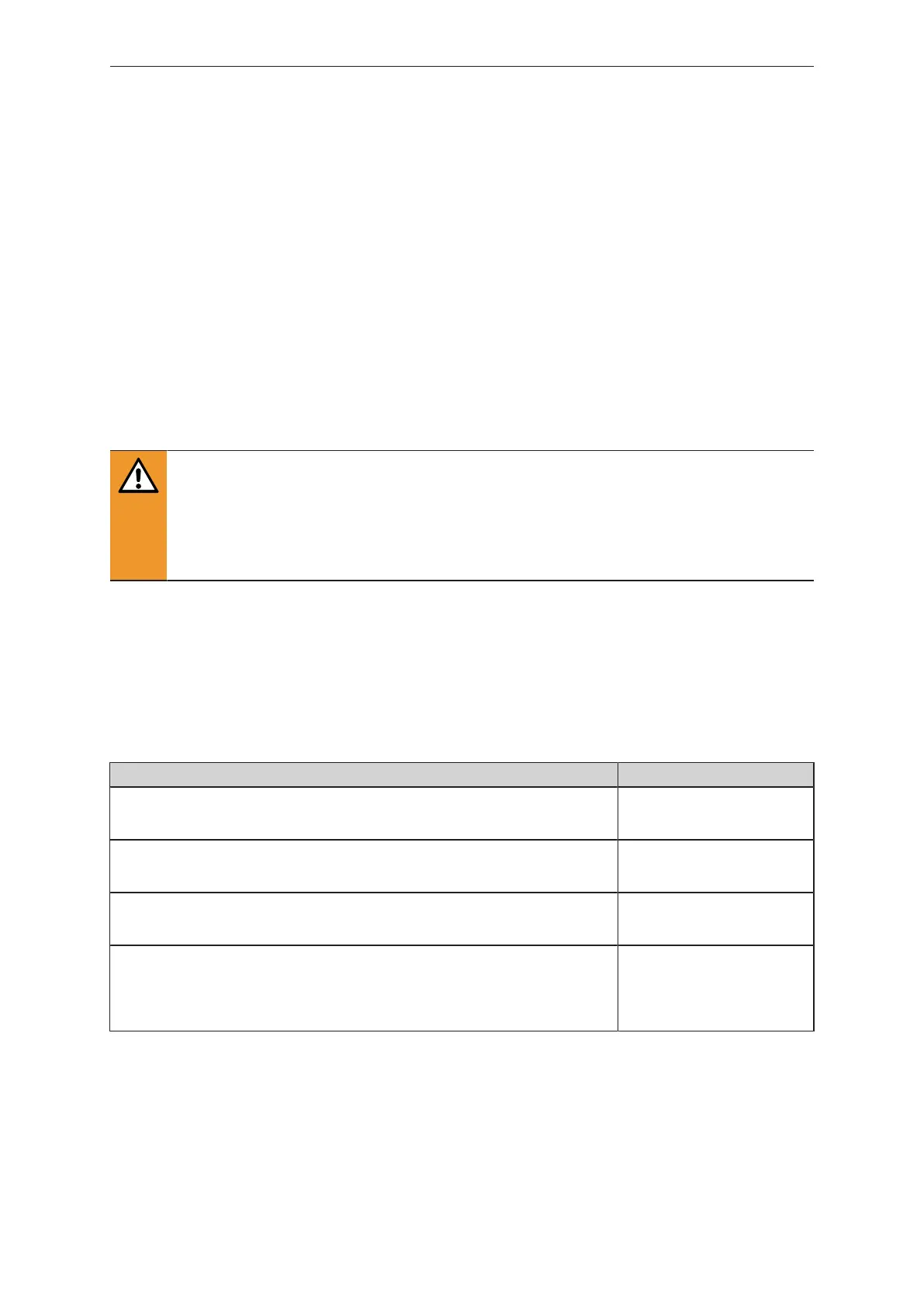
Check through safety controller Fault response
Cyclical consistency check of the current CANopen Safety SRDOs with the corresponding
inverse SRDOs in accordance with EN 50325-5, chapter CANopen Safety / Cyclical data
exchange specifications.
STOP
Monitoring of the safeguard cycle time (SCT) – Timing requirements for the CANopen
Safety SRDOs in accordance with EN 50325-5, chapter CANopen Safety / Cyclic data ex-
change specifications.
STOP
Monitoring of the safety-related validation time (SRVT) – Timing requirements for the
CANopen Safety SRDOs in accordance with EN 50325-5, chapter CANopen Safety / Cy-
clic data exchange specifications.
STOP
Only in ifm mode:
Monitoring of the safe-state bit in object 0x2420 ifm safety status when using the “Status
bit behaviour” function: Object 0x2410, Subindex 11
Safe-state bit 2
4
= “0”
Error behavior = “1”
STOP
Bekijk gratis de handleiding van IFM RM903S, stel vragen en lees de antwoorden op veelvoorkomende problemen, of gebruik onze assistent om sneller informatie in de handleiding te vinden of uitleg te krijgen over specifieke functies.
Productinformatie
| Merk | IFM |
| Model | RM903S |
| Categorie | Niet gecategoriseerd |
| Taal | Nederlands |
| Grootte | 1878 MB |







