Furuno NAVpilot-300 handleiding
Handleiding
Je bekijkt pagina 33 van 110
2 章 操舵モード
2-11
5. [ 実行 ] を選びます。
ターンを開始します。
注)ターンの角度は、メニューの [ その他設定 ]→[ 自動操舵設定 ]→[ ターン 1 角
度 ] または [ ターン 2 角度 ] で設定することもできます。
2.5 フィッシュハンター
™
モード
フィッシュハンター
™
は、当社独自の機能です。お持ちの当社製ソナー / 魚探、ま
たは鳥を探知するレーダーで魚群を探し出し、その位置データを本機に TLL 出力す
ると、物標付近で旋回、スパイラル、8 の字、またはジグザグ走行を行います。
2.5.1 フィッシュハンター
™
モードを選ぶ / 開始する
フィッシュハンター
™
モードには、旋回、スパイラル、8 の字、およびジグザグの 4
種類があります。手動モード、自動モード、および航法モード時に、左右どちらの
方向(ジグザグ走行以外)に対しても開始することができます。
次の手順でフィッシュハンター
™
モードを選び、ターンを開始します。
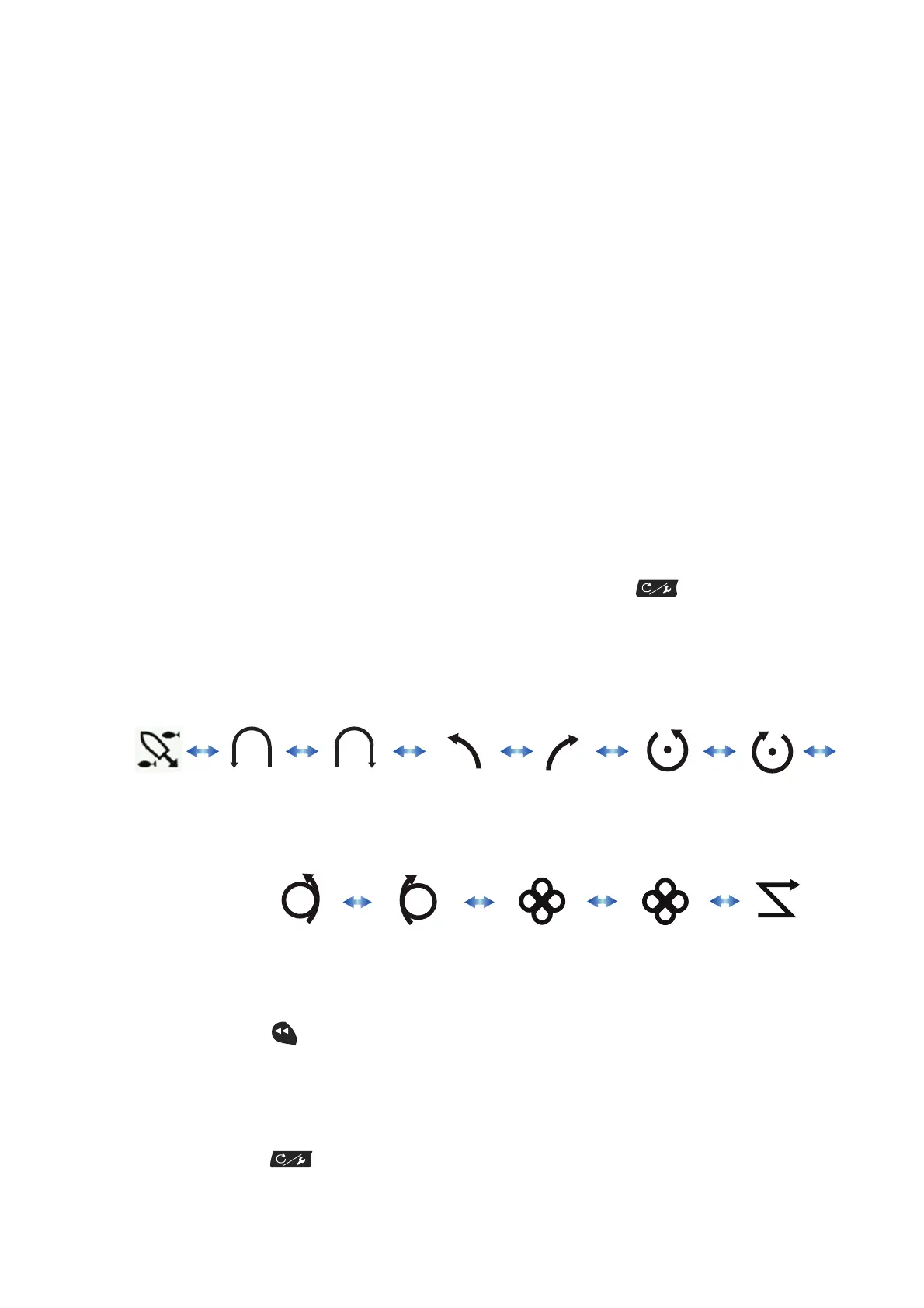
1. 手動モード、自動モード、または航法モード時に []キーを短く押し
て、ターンメニューを開きます。
2. ターンの種類を選択状態にします。
青の枠で囲まれているターンの種類が選択状態を表します。各ターンの詳細に
ついては、2.5.2 項を参照してください。
3. ターンの設定値を変更する場合は、次の手順 1)~ 4)を行います。変更す
る必要のない場合は、手順 4 に進みます。
1) [ ] キーを押して、設定メニューを開きます。
2) 設定値を変更する項目を選びます。
3) 設定値を変更します。
4) ターンを開始する場合は [ 実行 ] を選び、設定メニューを閉じる場合は
[]キーを押します。
㻿
㻼
㻼
㻿
㻼
㻿
㻼
㻿
㻼
㻿
ᕥ
㼄㼄㼄
㼻䡼䡬䢙
䠄䡼䡬䢙㻝䠅
ᕥ᪕ᅇ㉮⾜
ᕥ 㻤 䛾Ꮠ㉮⾜
䡸䢚䡴䢚䡷䢚䡴䢚㉮⾜
ྑ
㼄㼄㼄
㼻䡼䡬䢙
䠄䡼䡬䢙㻝䠅
ᕥ
㼄㼄㼄
㼻䡼䡬䢙
䠄䡼䡬䢙㻞䠅
ྑ
㼄㼄㼄
㼻䡼䡬䢙
䠄䡼䡬䢙㻞䠅
ྑ᪕ᅇ㉮⾜
ᕥ䡹䢆䢛䡮䢓䢕㉮⾜
ྑ䡹䢆䢛䡮䢓䢕㉮⾜
ྑ 㻤 䛾Ꮠ㉮⾜
㼄㼄㼄 䠖 タᐃ䛧䛯ゅᗘ䛻ᛂ䛨䛶ኚ䜟䜛
㻿㻭㻮㻵㻷㻵䢏䡬䢀䢚
10
Bekijk gratis de handleiding van Furuno NAVpilot-300, stel vragen en lees de antwoorden op veelvoorkomende problemen, of gebruik onze assistent om sneller informatie in de handleiding te vinden of uitleg te krijgen over specifieke functies.
Productinformatie
| Merk | Furuno |
| Model | NAVpilot-300 |
| Categorie | Niet gecategoriseerd |
| Taal | Nederlands |
| Grootte | 21151 MB |







