Furuno NAVpilot-300 handleiding
Handleiding
Je bekijkt pagina 102 van 110
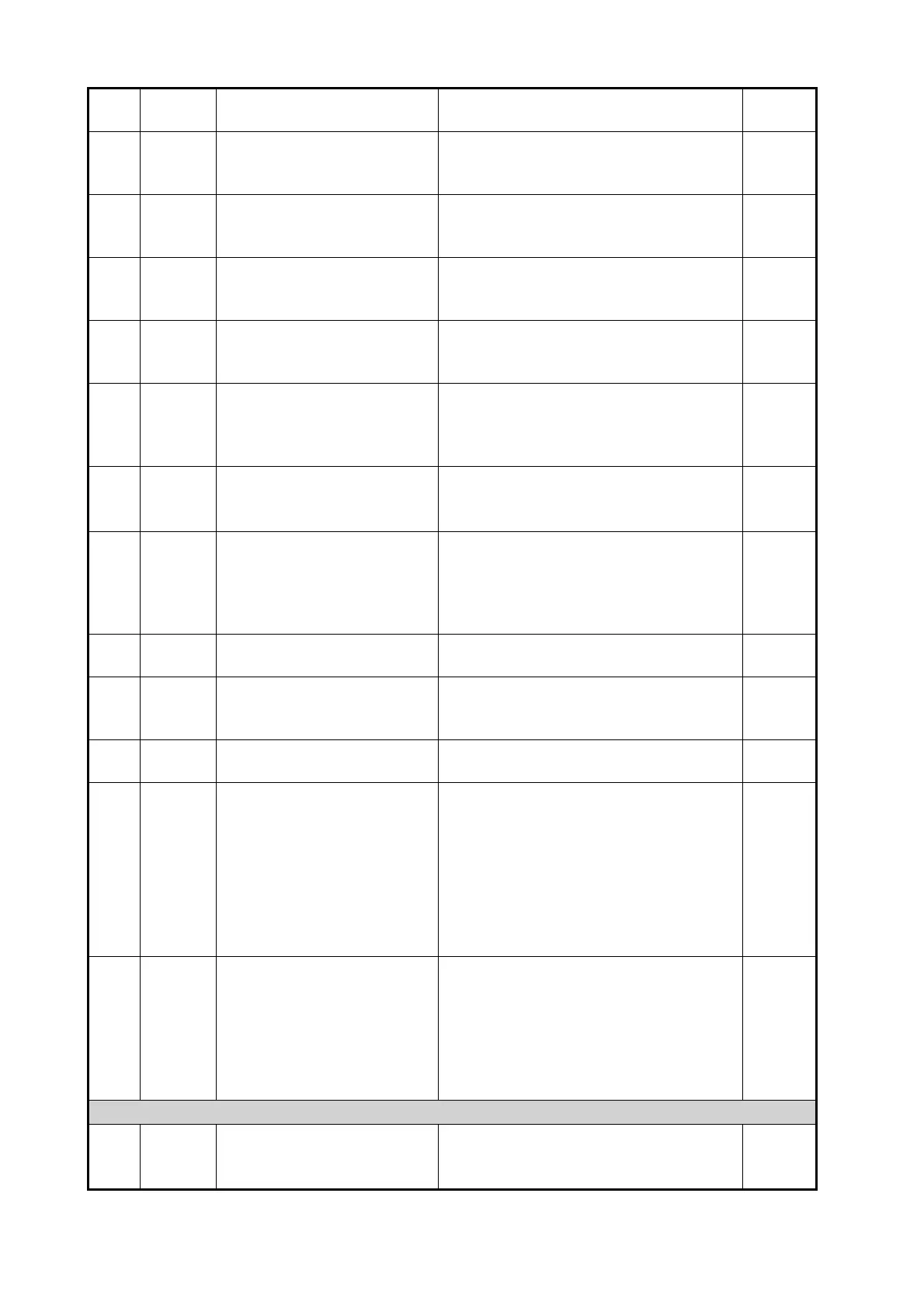
6 章 保守点検およびトラブルシューティング
6-16
14 1003
制御部と通信できません。 交信警報(操作部)を検知しました。
制御部と操作部間の接続を確認してく
ださい。
○
15 1004
船首方位情報を入力して下
さい。
船首方位データの入力がありません。
ヘディングセンサーを確認してくださ
い。
○
16 1005
船首方位情報が大きく変化
しました。
船首方位データが急変したことを検知
しました。ヘディングセンサーを確認
してください。
○
17 1006
角速度センサーエラー ヘディングセンサーからエラー情報が
入力されています。ヘディングセン
サーを確認してください。
○
18 1013
コンパスの初期化中です。
この作業には数分掛かる場
合がございます。しばらく
お待ちください。
ヘディングセンサーの初期化中です。
初期化が完了するまでお待ちください
(約 2 分間)。
○
19 1016
2 レバー間乖離警報左右の
レバー位置を揃えてくださ
い。
左右のレバー位置が離れすぎています。
左右のレバー位置を揃えてください。
○
20 1007
船速情報が入力されていま
せん。船速センサーを確認
するか、操舵パラメータ設
定から船速値を手動入力し
て下さい。
船速データの入力がありません。船速
データを確認してください。または、
手動で船速を入力してください(4.1.3
項参照)。
○
21 1008
航法情報を入力して下さい。 航法データの入力がありません。航法
センサーを確認してください。
○
22 1009
航法情報の精度が下がって
います。
精度の低い航法データが入力されてい
ます。航法センサーを確認してくださ
い。
○
23 1010
自船位置情報を入力して下
さい。
位置データの入力がありません。測位
センサーを確認してください。
○
24 1011
10kn 以下に減速して下さ
い。
フィッシュハンター
™
モード(左 / 右旋
回走行)時、船速が 10kn 以上になって
います。船速を 10kn 未満にしてくださ
い。
注) 0.03NM 未満の旋回半径で旋回走
行をしている場合は、船速を 7kn
未満にしてください。
○
25 1012
バックアップデータエラー 制御部のバックアップデータが壊れて
います。この警報が発生すると、メ
ニューの全設定が工場出荷時の状態に
戻ります。再度、装備設定を行う必要
がありますので、お買い上げ先、また
は当社支店・営業所に連絡してくださ
い。
○
警報の優先度 : Caution
26 2018
レバー操作無効警報レバー
を N に戻してください。
レバー操作が無効の状態で、レバー操
作を検知しました。有効にする場合は
レバーを N に戻してください。
優先
順位
エラー
コード
警報メッセージ 意味 / 対処法
警報
リスト
Bekijk gratis de handleiding van Furuno NAVpilot-300, stel vragen en lees de antwoorden op veelvoorkomende problemen, of gebruik onze assistent om sneller informatie in de handleiding te vinden of uitleg te krijgen over specifieke functies.
Productinformatie
| Merk | Furuno |
| Model | NAVpilot-300 |
| Categorie | Niet gecategoriseerd |
| Taal | Nederlands |
| Grootte | 21151 MB |







