FIMI Mini 3 SE handleiding
Handleiding
Je bekijkt pagina 11 van 51
10
·Users should always be aware of their surroundings and follow relevant warnings from the FIMI Navi Mini
App during flight, maintaining full control of the drone and being responsible for their actions.
·In the absence of GNSS signals, when using the visual system in open and flat areas, the optimal working
height range for the visual positioning system is 0.5-15 meters. Flying outside this range may decrease
positioning performance, so exercise caution.
·The visual system may not recognize surfaces without texture features and may not function correctly in
environments with insufficient or excessive lighting.
·The vision perception system may not work properly in the following scenarios:
a. Plain color surfaces (e.g., pure black, pure white, pure green).
b. Surfaces with strong reflections or reflections.
e. Scenes with rapidly changing lighting conditions.
f. Surfaces that are very dark (lighting less than 10 lux) or very bright (lighting greater than 40,000 lux).
g. Surfaces with strong infrared absorption or reflection (e.g., mirrors).
i. Surfaces with highly repetitive textures (e.g., small checkered tiles of the same color).
·Do not obstruct the downward-facing camera and infrared sensors in any way. If they become dirty, clean
them promptly. If damaged, contact after-sales service for repair.
·ATTI Mode(Attitude)
In ATTI (Attitude) mode, when GPS or optical flow signals are weak, the drone will rely on its internal sensors
for orientation and altitude control. The maximum flying speed is 16m/s, with a maximum ascent speed of
5 m/s and a maximum descent speed of 3.5 m/s. In ATTI mode, the drone may drift horizontally and does
not support intelligent flight features. To avoid accidents, users should fly in locations with strong GPS
signals and open spaces. If the drone enters ATTI mode, land it as soon as possible to a safe location.
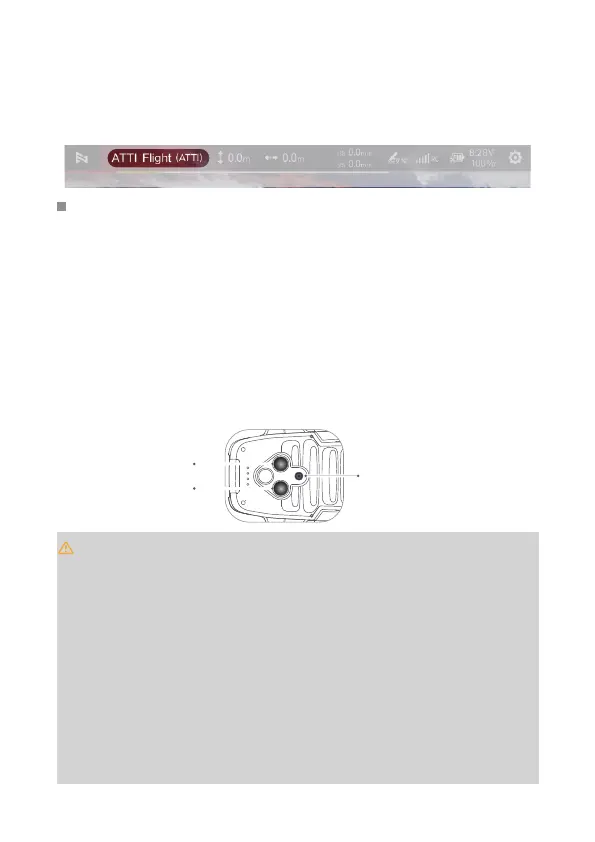
3. Downward Vision System
The product is equipped with a downward-facing sensing system consisting of a monocular camera
and a TOF (Time-of-Flight) module. The TOF module includes both an emitter and a receiver, which
measure the time taken for infrared signals to travel from emission to reception and reflection, thereby
calculating the drone's precise altitude relative to the ground. Combined with the monocular camera,
this system enables high-precision low-altitude positioning of the drone.
·Sensing Range
Downward Sensing System: Operates within a height range of 0.3 to 15 meters, with an effective detection
range of 0.3 to 5 meters for precise distance measurement. Automatically activates when visual positioning
conditions are met.
·Usage Scenarios
The downward vision system's positioning function automatically activates in environments with poor
or no GNSS signals. When using visual positioning for flight, the drone will actively limit its flight speed
to ensure positioning accuracy and flight safety.
Monocular camera
TOF module
TOF module
Bekijk gratis de handleiding van FIMI Mini 3 SE, stel vragen en lees de antwoorden op veelvoorkomende problemen, of gebruik onze assistent om sneller informatie in de handleiding te vinden of uitleg te krijgen over specifieke functies.
Productinformatie
| Merk | FIMI |
| Model | Mini 3 SE |
| Categorie | Niet gecategoriseerd |
| Taal | Nederlands |
| Grootte | 5607 MB |