Ecovacs DEEBOT X9 PRO OMNI handleiding
Handleiding
Je bekijkt pagina 71 van 140
71 SE
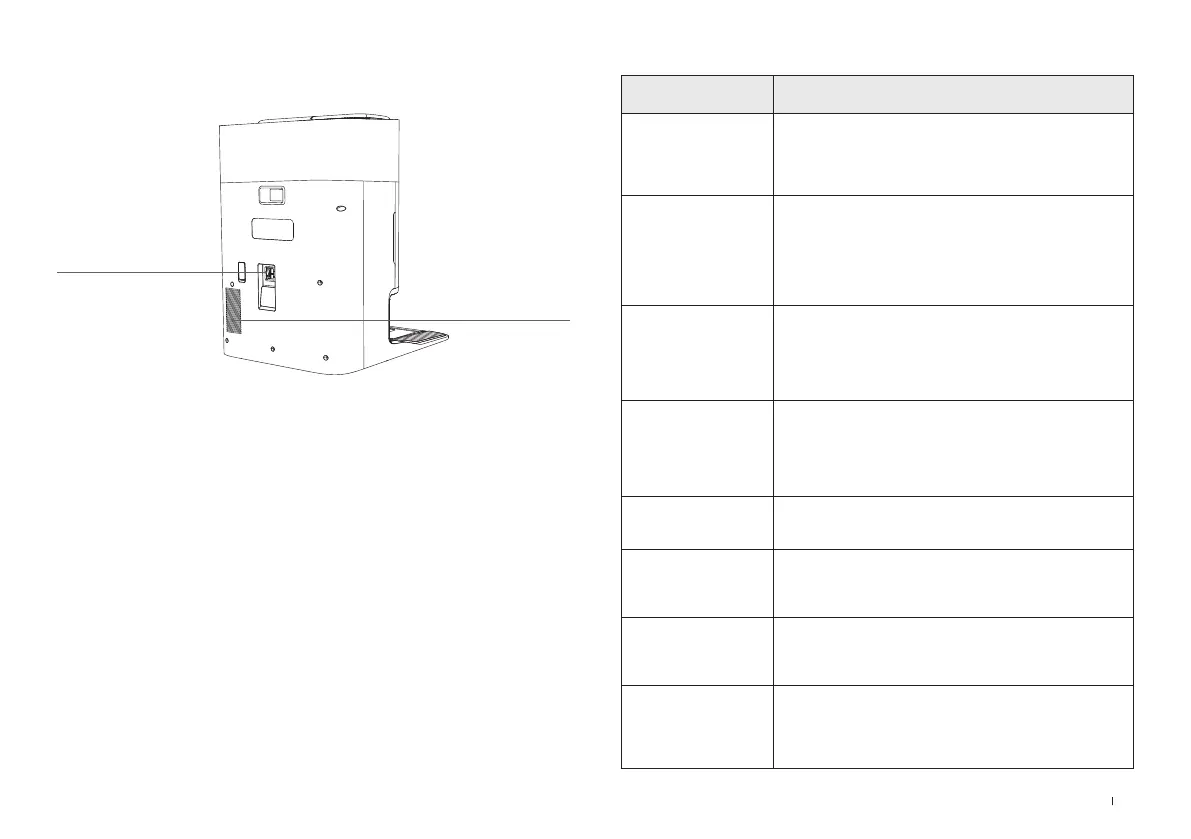
7. OMNI-station sedd bakifrån
Luftventil
Eluttag
Produktdiagram Funktionsbeskrivning
Navigationsmodul
Laseravståndsmätning används för att mäta avståndet mellan
roboten och omgivande föremål baserat på tidsskillnaden
i reflektionen, vilket gör att modulens plats kan kartläggas
gentemot de omgivande föremålen när roboten förflyttar sig.
Detektionsområdet är 10m.
Modul för undvikande av
hinder
Med infraröd avståndsmätning och konceptet med liknande
trianglar, sänder sensorn ut infraröda strålar och tar emot ljuset
från objekten framför sig för att beräkna avståndet mellan objektet
och roboten.
När sensorn upptäcker ett objekt i närheten, svänger
roboten automatiskt för att undvika att stöta på objektet.
Detektionsområdet är 0,3 m.
Anti-fall-sensorer
Infraröd avståndsmätning tillämpas av sensorn på robotens
undersida för att mäta höjden mellan robotens botten och golvet.
När roboten exempelvis befinner sig högst upp på trappan, med
en höjd över 55 mm på ljust golv eller en höjd över 30 mm på
mörkt golv, kommer roboten att sluta köra framåt med hjälp av
anti-fall-funktionen.
Mattavkänningssensor
Ultraljudssonden kan avge ultraljudsvågor med en frekvens på
300KHZ. Ultraljudsvågornas energi kan absorberas av mattor.
Om den reflekterade energin faller under tröskelvärdet känner
roboten igen närvaron av en matta. Enligt ECOVACS labbtester
kan över 50 typer av mattor på marknaden för närvarande
identifieras.
Anti-kollisionssensor
När den utsända signalen blockeras av ett objekt, kommer
signalmottagaren inte att kunna ta emot den. Med denna princip
kommer roboten att undvika hinder när den möter dem.
Kant
Sensor
Med ToF-avståndsmätning kan roboten upptäcka avståndet
mellan sig själv och objekt på sin högra sida. När det finns en
vägg eller ett hinder på höger sida, kommer roboten att utföra
kantrengöring för att undvika missade fläckar eller kollisioner.
AIVI-kamera
Använd AI-kameror för att samla in bilder av den omgivande
miljön.
*Använda videoinspelning. Genom interaktion med MIC kan
fjärrvideosamtal användas (för vissa modeller).
Mikrofon
Mänskliga röster orsakar vibrationer i mikrofonens membran
genom luften. Som ett resultat använder mikrofonen samlingen
och algoritmerna för ljudmodeller för att åstadkomma
ljudinspelning och röststyrning av roboten för att utföra specifika
uppgifter. Det effektiva väckningsavståndet är 5 m.
8. Sensorer
Bekijk gratis de handleiding van Ecovacs DEEBOT X9 PRO OMNI, stel vragen en lees de antwoorden op veelvoorkomende problemen, of gebruik onze assistent om sneller informatie in de handleiding te vinden of uitleg te krijgen over specifieke functies.
Productinformatie
| Merk | Ecovacs |
| Model | DEEBOT X9 PRO OMNI |
| Categorie | Stofzuiger |
| Taal | Nederlands |
| Grootte | 12839 MB |







