Ecovacs DEEBOT X9 PRO OMNI handleiding
Handleiding
Je bekijkt pagina 56 van 140
56IT
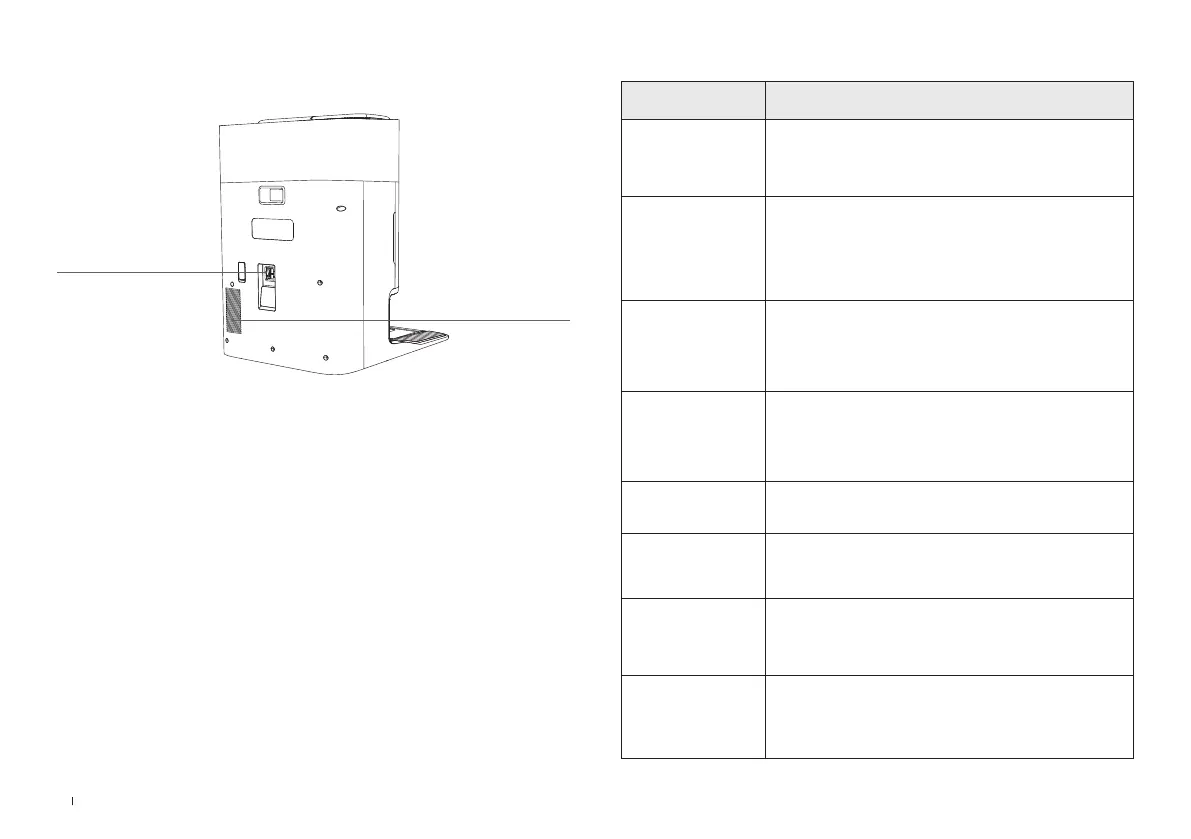
7. Vista posteriore della stazione OMNI
Presa d'aria
Presa di corrente
Schema del prodotto Descrizione funzionale
Modulo di navigazione
La misurazione laser viene utilizzata per misurare la distanza tra
il robot e gli oggetti circostanti in base alla differenza di tempo
di riflessione, consentendo al modulo di effettuare la mappatura
degli oggetti circostanti mentre il robot è in movimento. Il raggio di
rilevamento è di 10m.
Modulo di aggiramento
degli ostacoli
Grazie al rilevamento della distanza a infrarossi e al concetto di
triangoli simili, il sensore emette raggi infrarossi e riceve la luce
dagli oggetti posti davanti per calcolare la distanza tra l'oggetto e il
robot.
Quando il sensore rileva un oggetto nelle vicinanze, il robot
sterza automaticamente per evitare di urtare l'oggetto. Il raggio di
rilevamento è di 0,3 m.
Sensori anti-caduta
La misurazione a infrarossi viene realizzata dal sensore posto
nella parte inferiore del robot, per misurare l'altezza tra la parte
inferiore del robot e il terreno. Quando si trova in cima alle scale,
ad esempio, a un'altezza superiore a 55 mm da un suolo bianco o
superiore a 30 mm da un suolo nero, il robot smetterà di avanzare,
attivando la funzione anti-caduta.
Sensore di rilevamento
tappeto
La sonda a ultrasuoni può emettere onde ultrasoniche con una
frequenza di 300 kHz. L'energia delle onde ultrasoniche può
essere assorbita dai tappeti. Se l'energia riflessa è al di sotto della
soglia, il robot riconoscerà la presenza di un tappeto. Secondo i
test di laboratorio ECOVACS, attualmente si possono identificare
oltre 50 tipologie di tappeti disponibili sul mercato.
Sensore anticollisione
Se il segnale trasmesso viene bloccato da un oggetto, il ricevitore
del segnale non sarà in grado di riceverlo. Grazie a questo
principio, il robot eviterà gli ostacoli che incontrerà.
Sensore
di bordo
Grazie alla misurazione della distanza ToF, il robot è in grado
di rilevare la distanza tra sé e gli oggetti che si trovano sul lato
destro. Se sul lato destro è presente un muro o un ostacolo, il
robot pulirà il bordo per evitare di trascurare punti o collisioni.
Fotocamera AIVI
Uso di telecamere IA per acquisire immagini dell'ambiente
circostante.
*Realizzare la registrazione video. Tramite l'interazione con il
microfono è possibile effettuare videochiamate a distanza (per
alcuni modelli).
Microfono
Le voci umane provocano vibrazioni nel diaframma del microfono
attraverso l'aria. Di conseguenza, il microfono utilizza la raccolta
e gli algoritmi dei modelli sonori per ottenere la registrazione
del suono e il controllo vocale del robot per effettuare attività
specifiche. La distanza effettiva di riattivazione è di 5 m.
8. Sensori
Bekijk gratis de handleiding van Ecovacs DEEBOT X9 PRO OMNI, stel vragen en lees de antwoorden op veelvoorkomende problemen, of gebruik onze assistent om sneller informatie in de handleiding te vinden of uitleg te krijgen over specifieke functies.
Productinformatie
| Merk | Ecovacs |
| Model | DEEBOT X9 PRO OMNI |
| Categorie | Stofzuiger |
| Taal | Nederlands |
| Grootte | 12839 MB |







