Ecovacs DEEBOT X8 PRO OMNI handleiding
Handleiding
Je bekijkt pagina 10 van 60
10JA
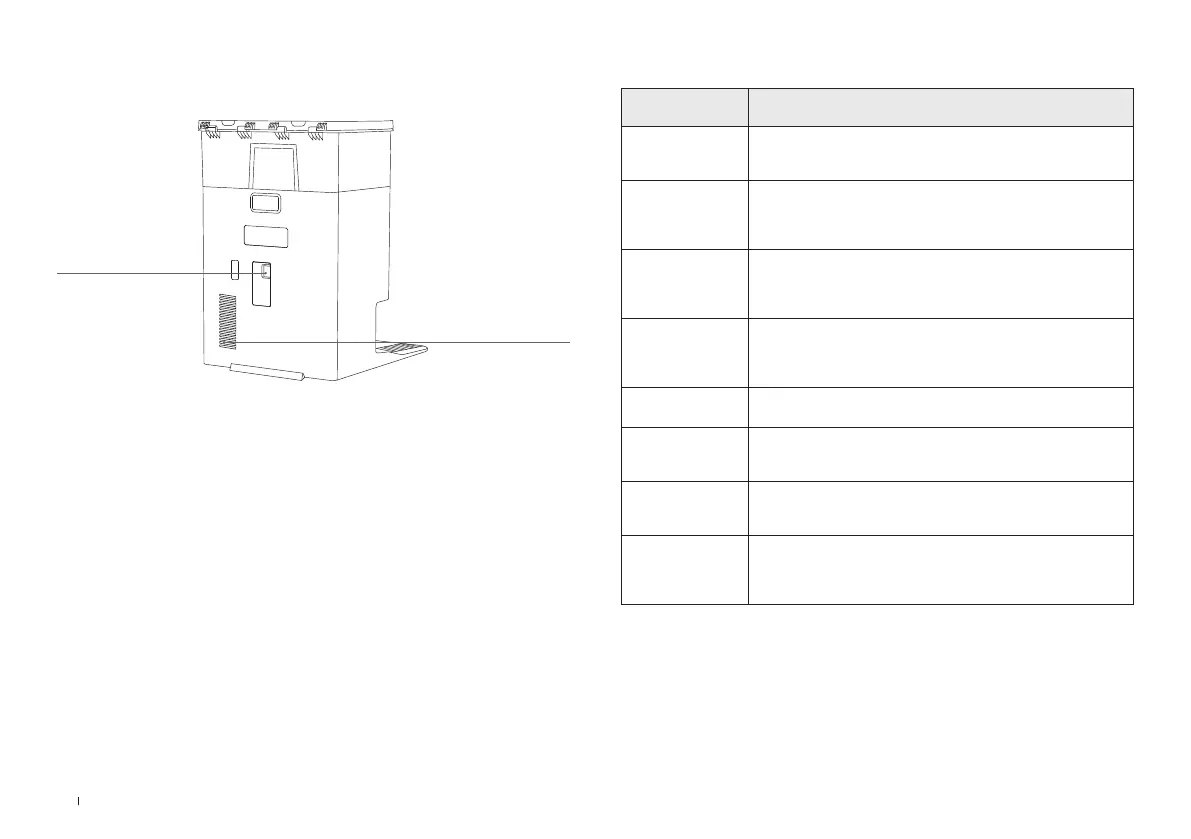
7. OMNI ステーション背面図
通気口
電 源 ソ ケット
製品図 機能説明
d-ToF
レーザーモジュール
レーザー測距は、反射の時間差に基づいてロボットと周囲の物体との距
離を測定し、ロボットが移動中に周囲の物体をマッピングすることを可能
にします。検知範囲は 12m です。
TrueDetect3D セン
サー
センサーは赤外線測距と相似三角形の概念を利用し、赤外線を発射して
前方の物体からの光を受信し、物体とロボット間の距離を計算します。
センサーが近くの物体を検出すると、ロボットは自動的に方向を変えて物
体にぶつからないようにします。検知範囲は 0.3m です。
落下防止センサー
ロボット底部のセンサーは赤外線測距を用いて、ロボットの底面と地面と
の高さを測定します。例えば、階段の最上部で、白色の床で高さが 55mm
以上、黒色の床で高さが 30mm 以上の場合、ロボットは前進を停止し、
落下防止機能を実現します。
カーペット検知センサ
ー
超音波プローブは 300KHZ の超音波を放射でき、超音波のエネルギー
はカーペットに吸収されます。反射エネルギーがしきい値以下の場合、ロ
ボットはカーペットの存在を認識します。ECOVACS ラボのテストによると、
現在市場で販売されている 50 種類以上のカーペットを識別できます。
衝突防止センサー
送信された信号が障害物によって遮られた場合、受信機は信号を受信で
きなくなります。この原理により、ロボットは障害物に遭遇すると回避します。
エッジ
センサー
ToF 距離測定により、ロボットは自身と右側の物体との距離を検出できま
す。右側に壁や障害物がある場合、ロボットはエッジクリーニングを行い、
掃除の漏れや衝突を回避します。
AIVI カメラ
AI カメラを使用して周囲の環境の画像を収集します。
* ビデオ録画を実現します。マイクとの連携により遠隔ビデオ通話が可能
になります(一部モデル)。
マイクロフォン
人間の声は空気を通してマイクのダイアフラムを振動させます。その結果、
マイクは音声モデルの収集とアルゴリズムを利用して、音声の録音とロボ
ットの音声制御を実現し、特定のタスクを完了します。有効な音声認識距
離は 5m です。
8. センサー
Bekijk gratis de handleiding van Ecovacs DEEBOT X8 PRO OMNI, stel vragen en lees de antwoorden op veelvoorkomende problemen, of gebruik onze assistent om sneller informatie in de handleiding te vinden of uitleg te krijgen over specifieke functies.
Productinformatie
| Merk | Ecovacs |
| Model | DEEBOT X8 PRO OMNI |
| Categorie | Stofzuiger |
| Taal | Nederlands |
| Grootte | 7207 MB |







