Curtis 1355 handleiding
Handleiding
Je bekijkt pagina 25 van 44
4 — CANopen COMMUNICATIONS
pg. 21
Return to TOC Curtis 1355 CANopen Soft Starter Module Manual – September 2020
on successive processing cycles until the queue is empty. e same scheme applies to the concurrent
clearing of faults and their corresponding Emergency messages.
e Emergency message will have device-specic fault bytes in addition to the CANopen mandatory
Error Register and Error Category. Note: Bit 0 of the Error Register object must always be set to 1
in any error situation.
Data Bytes 1 and 2 – Error Category
These data bytes, which are not explicitly defined by CANopen, are used to provide narrower
categorization up to and including individual faults when deemed appropriate. e error category
value implies the values that will appear in bytes 4 through 8 of the error message (the “Manufacture
Specic Error Field”). ese additional bytes are used to provide supporting information about the
particular fault or faults being reported in an Error Category by a given Emergency message. e
following error categories are dened:
0x0000 Fault Reset or No Fault
0x1000 Generic Fault
0x1001 Generic Fault
Please refer to the product specic CANopen implementation manual for lists of errors occurring
under each of these categories
Data Byte 3 – Error Register
CANopen requires that the object ID of the error_register be included in each Emergency message.
Currently, only bit 0 of the Error Register is dened. is bit is set when any of the faults are set.
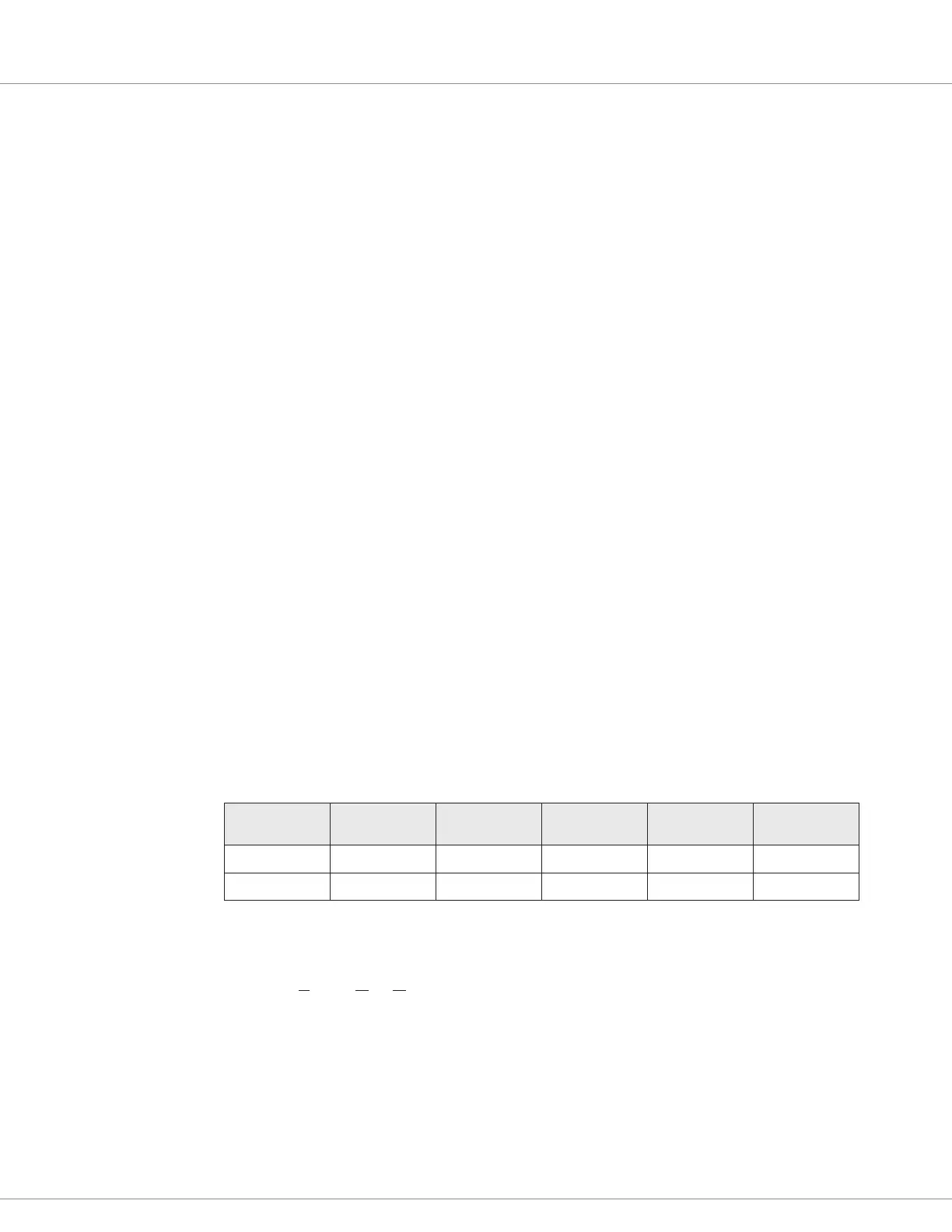
Data Bytes 4 through 8 – Manufacture Specific Error Field
e values that appear in these last 5 bytes depend on the Error Category that is being reported. e
last 5 bytes are dened as follows.
Error
Category
Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
0x1000 Diagnostic1 Diagnostic2 Diagnostic3 Diagnostic4 Diagnostic5
0x1001 Diagnostic6 Diagnostic7 Diagnostic8 Diagnostic9 Diagnostic10
PDOs
e PDO (Process Data Object) communication packets conserve bus bandwidth by bundling the
values of a group of objects into a single message. e 1355 uses four PDOs, two from the system
manager and two responsive PDOs sent from the 1355 itself. e content of these PDOs can be
dynamic mapped as Curtis AC motor controllers. PDO messages have a medium priority and always
carry 8 bytes of data. e Curtis CANopen implementation requires that the incoming PDOs be
immediately responded to by an outgoing PDO. e 1355 will respond to the PDO-RX with its
PDO-TX within 16 ms.
Bekijk gratis de handleiding van Curtis 1355, stel vragen en lees de antwoorden op veelvoorkomende problemen, of gebruik onze assistent om sneller informatie in de handleiding te vinden of uitleg te krijgen over specifieke functies.
Productinformatie
| Merk | Curtis |
| Model | 1355 |
| Categorie | Niet gecategoriseerd |
| Taal | Nederlands |
| Grootte | 5646 MB |







